Controlador de controlador de servomotor ZLTECH 24V-48V DC 30A CAN RS485 per a màquina CNC





El servomotor és una part important del control de moviment modern i s'utilitza àmpliament en equips d'automatització, com ara robots industrials i centres de mecanitzat CNC.La tecnologia de servoconducció, com una de les tecnologies clau per al control de màquines eina CNC, robots industrials i altra maquinària industrial, ha rebut una gran atenció en els últims anys.
El servo controlador utilitza un processador de senyal digital (DSP) com a nucli de control, que podria realitzar algorismes de control més complexos i realitzar digitalització, xarxes i intel·ligència.Al mateix temps, disposa de circuits de detecció i protecció d'avaries que inclouen sobretensió, sobreintensitat, sobreescalfament, baixa tensió, etc.
El control del servocontrolador es divideix en bucle de posició, bucle de velocitat i bucle de corrent segons el seu objecte de control des de l'exterior cap a l'interior.En conseqüència, el servomotor també pot suportar el mode de control de posició, el mode de control de velocitat i el mode de control de parell.El mode de control del conductor es pot donar de quatre maneres: 1. Configuració de la quantitat analògica, 2. Configuració interna del paràmetre, 3. Configuració de pols + direcció, 4. Configuració de comunicació.
L'aplicació de la configuració interna de la configuració de paràmetres és relativament escassa, i és limitada i ajustada per passos.
L'avantatge d'utilitzar la configuració de quantitat analògica és la resposta ràpida.S'utilitza en moltes ocasions d'alta precisió i alta resposta.El seu inconvenient és que hi ha una deriva zero, la qual cosa comporta dificultats per a la depuració.Els servosistemes europeus i americans utilitzen principalment aquest mètode.
El control de pols és compatible amb mètodes de senyal comuns: CW/CCW (pols positiu i negatiu), pols/direcció, senyal de fase A/B.El seu inconvenient és la baixa resposta.Els servosistemes japonesos i xinesos utilitzen principalment aquest mètode.
La configuració de comunicació és actualment el mètode de control més utilitzat.Els seus avantatges són la configuració ràpida, la resposta ràpida i la planificació raonable del moviment.El mode comú de configuració de comunicació és la comunicació per bus, que fa que el cablejat sigui senzill, i el protocol de comunicació diversificat també ofereix als clients més opcions.
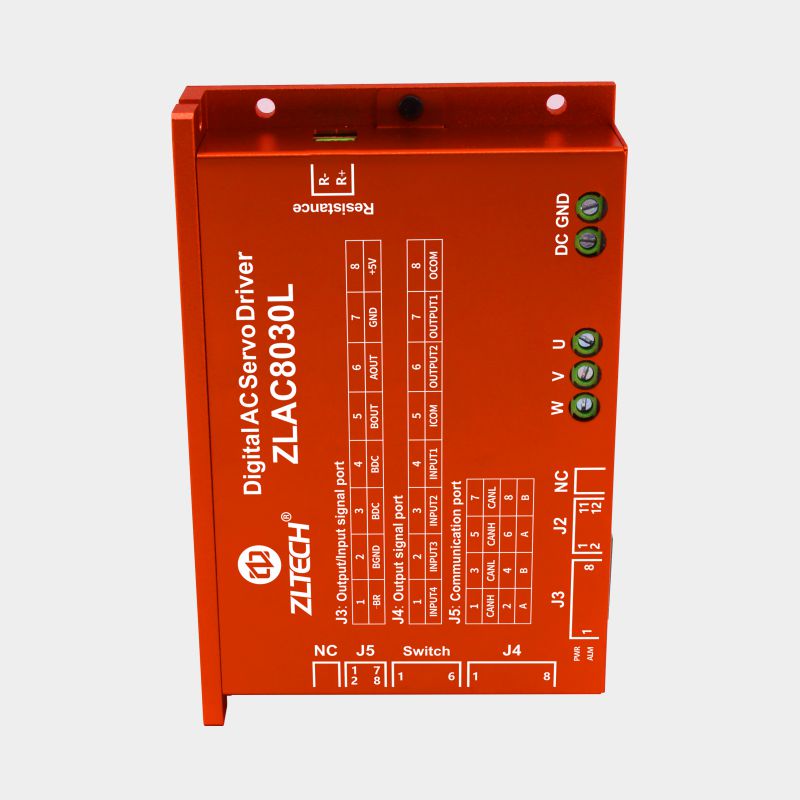
ZLAC8030 és un servocontrolador digital d'alta potència i baixa tensió desenvolupat per ells mateixos de manera independent.El seu sistema té una estructura senzilla i alta integració.Afegeix comunicacions de bus i funcions de controlador d'un sol eix.Es combina principalment amb servomotors de 500W-1000W.
Paràmetres
| NOM DEL PRODUCTE | CONDUCTOR SERBO |
| P/N | ZLAC8030L |
| TENSIÓ DE FUNCIONAMENT (V) | 24-48 |
| CORRENT DE SORTIDA (A) | 30A, MÀXIM 60A |
| MÈTODE DE COMUNICACIÓ | CANOPEN, RS485 |
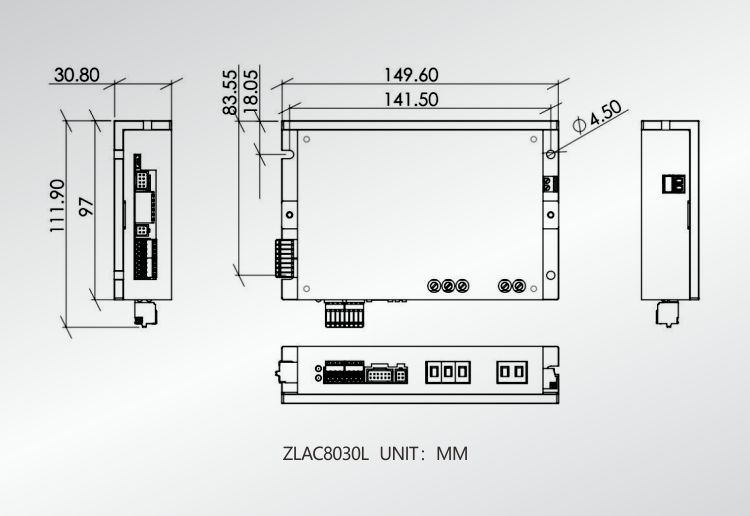
| DIMENSIÓ (mm) | 149,5*97*30,8 |
| SERVOMOTOR DE HUB ADAPTAT | SERVOMOTOR DE HUB D'ALTA POTÈNCIA |
Dimensió
Aplicació

Embalatge

Dispositiu de producció i inspecció

Qualificació i Certificació

Oficina i fàbrica

Cooperació

Categories de productes
-

ZLTECH trifàsica 60mm Nema24 24V 100W/200W/300W/40...
-

ZLTECH 42mm 24V 1.5A 0.5Nm CANopen integrat...
-

ZLTECH 6,5 polzades 24V-48V 150W 120kg BLDC elèctric...
-

Motor de cub ZLTECH de 9,5 polzades 48V 20N.m per a l'agricultura...
-

Codificador ZLTECH Nema23 CANopen passos integrats...
-

ZLTECH Nema17 0.5/0.7Nm 18V-36V pas integrat...





